















Упаковочные машины с модульной системой обработки изображений
Pick and Place Vision System обеспечивает постоянно высокое качество
Автоматиз�ация невозможна без промышленной обработки изображений. В автоматизированных процессах упаковки системы обработки изображений также играют значительную роль. И это по-настоящему важно, так как необходимой характеристикой производственного процесса, например, при фасовке и укладке или в машинах для упаковки в рукавную пленку является непрерывный поток продукции. Видеокамеры, однако, работают с отдельными снимками, не полностью отображающими поток продуктов. Поэтому компания Schubert разработала собственную систему визуализации Pick and Place Vision System, соответствующую требованиям упаковочных машин и поддерживающую работу роботов.
Система визуализации для контроля качества
С применением системы визуализации Pick and Place Vision System заказчикам оборудования компании Schubert обеспечивается автоматизированный и более эффективный контроль качества. Только изделия, соответствующие запрограммированным спецификациям заказчика, идентифицируются системой визуализации и принимаются фасовочно-укладочными роботами упаковочной машины. Будь то машина для упаковки в пакеты из рукавной пленки, картонажная машина или фасовочно-укладочный робот – на выходе процесса упаковки производитель получает снижение доли брака и количества рекламаций, сокращение затрат и гарантию постоянно высокого качества продукции
Модульные системы обработки изображений для любых применений
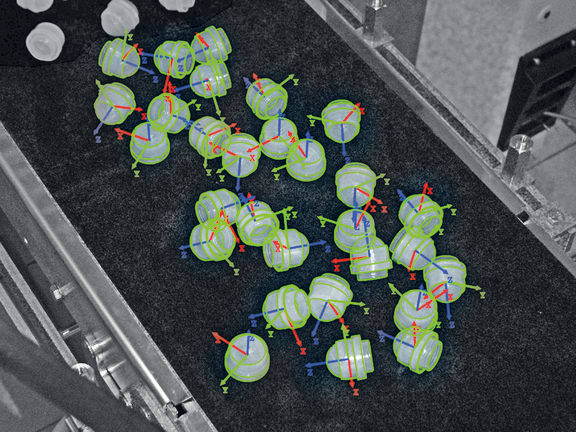
Базовым элементом системы визуализации Pick and Place Vision Systems компании Schubert являются однострочные ПЗС-датчики. Они интегрированы в систему сканеров отраженного света и 3D-сканеров, обеспечивая постоянное наблюдение за потоком продуктов. Как и все системные компоненты упаковочных машин компании Schubert, система визуализации также имеет модульную конструкцию. Модули размером 200 мм комбинируются в сканере, обеспечивая охват рабочей зоны транспортера продукта шириной до 1800 мм. Система визуализации для промышленной обработки изображений укомплектована также встроенным освещением, программным обеспечением и другими прикладными функциями. К ним относится также функция захвата хаотично расположенных продуктов, выполняемая фасовочно-укладочным роботом.
В будущем: нейронные сети
Существуют, однако, продукты, контроль качества которых обычными системами обработки изображений невозможен. Принцип работы классических систем визуализации основан на том, что изделия могут быть однозначно идентифицированы по небольшому числу параметров. В так называемых «живых» продуктах с высокими производственными допусками отклонения столь велики, что их очень трудно или даже невозможно описать математически. Программному обеспечению приходится проверять слишком много параметров, которые, к тому же, взаимно коррелируют и зависят друг от друга. Поэтому компания Schubert в своей системе визуализации в будущем будет делать ставку в основном на нейронные сети и искусственный интеллект. В этом случае система обработки изображений является самообучаемой и в ходе длительного процесса обучения самостоятельно сортирует изделия по классам. Это означает, что параметры выбираются самой системой, а не программистом. Для заказчиков это является шагом к самостоятельным действиям. При определенных условиях они в будущем смогут с помощью нейронных сетей сами программировать свои упаковочные машины на новый продукт.
Модульная технология сканирования
Обработка изображений в системе визуализации 2D- и 3D-формата

Контроль качества на практике
Фасовка и укладка с системой визуализации
Pick and Place Vision System с модульной концепцией


КОНТАКТ